Tapo RV10 Serisi Robot Süpürgem Tekrar Şarj Yuvasına Dönmezse Ne Yapmalıyım?
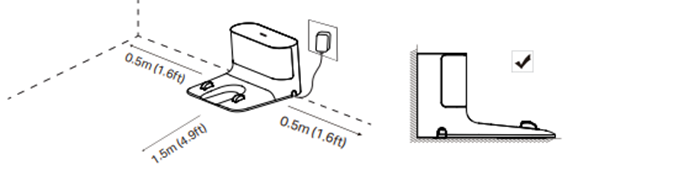
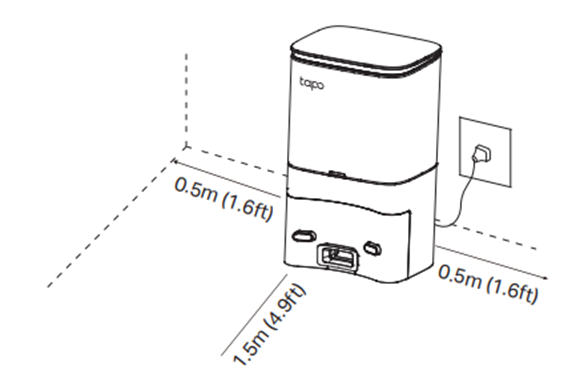
1. Check the position of the charging dock.
Place the dock on a level surface, flat against a wall, without obstacles within 1.5 m (4.9ft) in front and 0.5 m (1.6ft) on the left and right. Make sure the charging dock is properly powered on.
2. Robot süpürgesini şarj yuvasının 1 metre önüne yerleştirin. Ardından yuvayı başarıyla bulup bulamadığını görmek için şarj işlevini başlatın.
Bu adım, şarj yuvası veya vakum şarj modülü arızası olup olmadığını gidermek içindir. Şarj yuvasına dönmeyi başaramazsa, lütfen bize ne yaptığını gösteren bir video gönderin.
3. Robot süpürgesinin şarj yuvasından başlatılması önerilir.
RV10 serisi ataletsel navigasyon sistemini kullanır. Temizliği şarj yuvasından başlatarak, şarj verimliliğini artırmak için yuva konumu ve temizleme yolu daha iyi kaydedilebilir.
4. RV10 serisi için temizlik sırasında süpürgenin hareket ettirilmemesi önerilir.
Bir hareketten sonra mevcut konum yeniden konumlandırılamaz. Ve mevcut temizleme yolu kaydı kaybolacak, bu da şarj verimliliğinde azalmaya neden olacaktır.
5. İç ortamda halılar ve fan tabanları, eşikler ve U şeklindeki masa/sandalye ayakları gibi engeller olup olmadığını kontrol edin.
RV10 serisi ataletsel navigasyon sistemini kullanır. Engel-Çapraz Yüksekliği 2 cm iken, bu engeller robotun engeller üzerinde tekrar tekrar yukarı ve aşağı gitmesine neden olabilir. Halılar tekerleklerin kaymasına neden olabilir. Bu nesneler jiroskop gibi sensörlerin hata vermesine ve yanlış yol kaydına neden olabilir. Ataletsel navigasyon sistemi modellerinin ortak bir sorunudur.


6. Şarj yuvasının konumunu değiştirin ve tekrar kontrol edin.
Yukarıdaki adımlar sorunu çözmediyse, daha fazla yardım için lütfen TP-Link Destek birimiyle iletişime geçin.
Bu SSS faydalı mı?
Your feedback helps improve this site.


