如果我的 Tapo 機器人吸塵器清潔路徑雜亂異常,該怎麼辦?
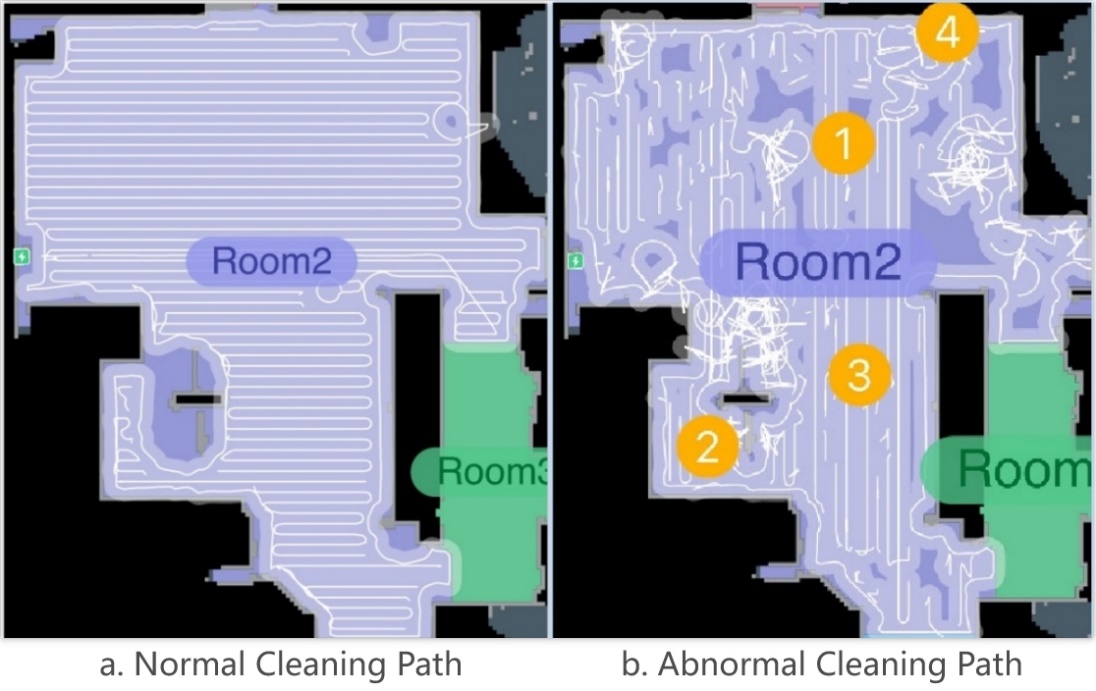
整體來說,Tapo掃地機器人採用規則、高效的 Zigzag 路徑來完成清潔任務。但是,如果您的掃地機器人的清掃路徑雜亂、混亂、隨意彎曲或出現圓形異常,請參考本文進行改進。
這個問題與清潔環境密切相關。請檢查一下你家是否有以下情況。
1. 清掃區域內障礙物可能過多,導致掃地機器人無法順利清掃。請調整家具和其他障礙物的擺放位置,讓掃地機器人順利通過。
2. 某些特殊家具,例如風扇底座或 U 形椅子腿,可能會卡住掃地機器人,導致其反覆盤旋以試圖逃脫。如果經常被困在這些區域,建議按照如何優化和編輯 Tapo 掃地機器人的地圖,第三點在地圖上設定禁區
3. 請勿在潮濕的地板上使用掃地機器人,以防止輪子打滑,這可能會導致路徑異常。
4. 機器人吸塵器透過其 LiDAR 感測器發射和接收雷射訊號來導航和清潔。強烈的陽光可能會干擾 LiDAR,影響掃地機器人的導航。在這種情況下,請拉上窗簾或等到陽光減弱後再進行清潔。
5. 地板鏡或金屬表面等高反射性物體也可能干擾 LiDAR 感測器的正常運作。如果有這樣的物體,請用不透明的材料覆蓋其底部 30 公分的部分。
如果您已經嘗試過上述建議,請進一步檢查掃地機器人本身。
1. 確保韌體是最新的,以保持最佳設備效能。您可以透過以下路徑檢查韌體: Tapo App > 掃地機器人 > 設定 > 韌體升級。
2. 檢查主輪或腳輪內是否有異物卡住,並清理乾淨。您可以參考以下兩個常見問題來了解清潔說明:
3. 檢查輪胎是否被油或化學物質污染。用布將它們擦拭乾淨。
4. 如果機器人吸塵器有安裝拖布架,請將其取下或清洗拖布,然後再試一次。
5. 檢查 LiDAR 感應器是否被灰塵或毛髮遮擋,並進行清潔。
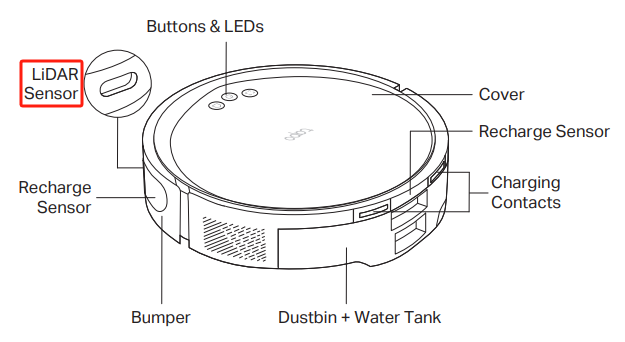
1) 如果您的型號是 RV20 系列或 RV20 Max 系列,且 LiDAR 感應器位於前部:請檢查感應器鏡頭表面是否髒污。如果是的話,請用濕布輕輕擦拭乾淨,然後用紙巾擦乾。
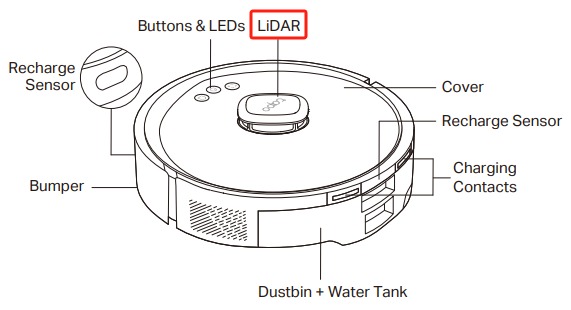
2) 如果您的型號是 RV30 系列或 RV30 Max 系列,且 LiDAR 感應器位於頂部:請檢查感應器內部是否有頭髮或紙屑。如果是,請用手或工具小心地將其取出。
如果您已嘗試上述所有方法但問題仍然存在,請聯絡 TP-Link 支援以獲得進一步協助。
這篇faq是否有用?
您的反饋將幫助我們改善網站

